[MicroPython 教學] Build ESP32 MicroPython Firmware
學習 MicroPython (MPY),除了瞭解如何使用他以及更改 main.py 來控制你的 Embedded Board 外;Build MPY Image 更是能深入瞭解 MP 的程式碼,客製化 MPY Image,因為 MPY 比起 Arduino ,他的優勢就是在 Package 的豐富性,官方給的都是通用的 package;想要創造差異性,唯有客製化自己的 MPY Image,不是嗎 ?
所以瞭解如何 Build MPY Image 是必要的,也是深入學習應用 MPY 的重要步驟。
以下是 ESP32 MPY Building Guide 以及 原始碼的連接
MicroPython Source Code on GitHub
ESP32 Building Guide : MicroPython port to the ESP32
以下是我 Build ESP32 MicroPython Image 過程及步驟
取得 MicroPython v1.13 stable version source code
git clone -b v1.13 --recursive https://github.com/micropython/micropython
在正式進入 Build ESP32 MPY Code 前,我們需要 ESP-IDF tool,
因為 ESP32 MPY 的底層還是以 C Code 完成的,所以我們還是需要
ESP-IDF tool 來 Build ESP32 底層的 C Code。
可以參考我這篇文章 ( [Arduino] Build ESP32 code on Ubuntu ),
,如何取得,設定 ESP-IDF 以及 Build ESP32 Code 或參考官方連接
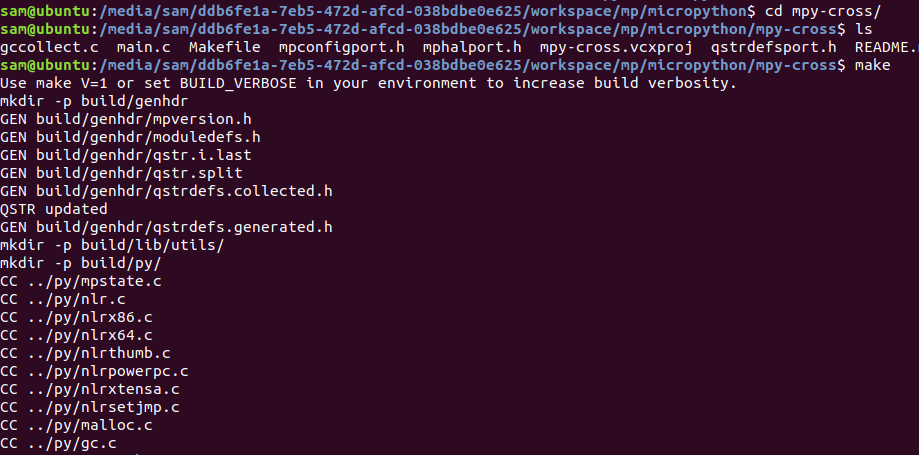
這一步是 Build “ MicroPython Cross-Complier”,簡稱 mpy-cross,
它的做用是轉換 (pre-compile) Python script (.py) 成 .mpy file 檔案。
例如,原來是 foo.py 的 Python script ,透過以下command 的執行
$ ./mpy-cross foo.py
foo.py 就轉換成 foo.mpy ,然後就可以被置放在 MPY 的檔案系統內了,
你就可透過 import foo 來使用他了。
Build MicroPython Cross-Complier 的作法 :
$ cd mpy-cross
$ make

完成前面兩項前置工作後,是時候 build ESP32 MPY image 了
$ cd .. /ports/esp32
$ make
很不幸的,遇到以下的錯誤 :-(
那是因為 ESP-IDF 的路徑還沒設定

我們需要打開 Makefile 做一下修改,設定 ESP-IDF 的路徑。
$ vi Makefile
$ code Makefile (如果你有裝 Visual Studio Code)
把這一行
ESPIDF = $(IDF_PATH)
修改成這樣
ESPIDF = $(/home/sam/esp/esp-idf)
(/sam 是我 Ubuntu account name,請改成你的)
或是直接執行 (如果你已經有安裝 ESP-IDF Tool)
. $HOME/esp/esp-idf/export.sh
再下一次 make 指令
還是遇到以下的錯誤 :-(

首先是 ESP-IDF 的版本和 MPY 使用的版本不合,所以給了以下警告!
"The build may complete and the firmware may work but it is not guaranteed",是警告所以還能繼續Build
後頭就出現錯誤了
kconfiglib.KconfigError: /home/sam/esp/esp-idf/Kconfig:185: '$COMPONENT_KCONFIGS_PROJBUILD_SOURCE_FILE' not found (in 'source "$COMPONENT_KCONFIGS_PROJBUILD_SOURCE_FILE"').
所以我們就乖乖的換成他支援的 ESP-IDF 的版本 (v4.0) 吧!
Supported git hash (v3.3): 9e70825d1e1cbf7988cf36981774300066580ea7
Supported git hash (v4.0) (experimental): 4c81978a3e2220674a432a588292a4c860eef27b
作法 :
cd $IDF_PATH/
sudo git reset --hard 4c81978a3e2220674a432a588292a4c860eef27b
sudo git submodule update --init --recursive
執行上面3行指令後,記得要再執行一次
./install.sh
這樣才是真正完成 ESP-IDF 版本的切換
完成 ESP-IDF 版本的切換後,這樣就可以再下一次 make 指令了

解決了 ESP-IDF 版本不合的錯誤了,但還有新的錯誤!

這裡是顯示是 1) 已經 Build & Link 完成了 2) 在做 .bin 階段時, 出現 Python2 呼叫不到的問題。
這裡的解法可以是 1) 建立一個 Python2 symlink 或 2) 直接改成呼叫 Python3,而我選擇了第2種做法。
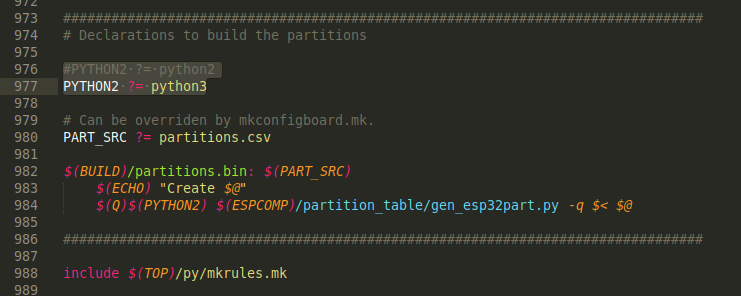
把 行976 mark 掉,改成 行977。

完成了, 產生 firmware.bin 檔案,就放在 build-GENERIC/ folder 下
下載 MPY Image cd
這是 MicroPython 官方給的下載指令
http://micropython.org/download/esp32/
首先是清除 Flash ,尤其是有下載過 Arduino 程式碼的
esptool.py --chip esp32 --port /dev/ttyUSB0 erase_flash
接著才是燒錄我們自己 build 過的 Image,這裡有一點要注意的是 firmware 燒錄的起始位置是在 0x1000
esptool.py --chip esp32 --port /dev/ttyUSB0 --baud 460800 write_flash -z 0x1000 firmware.bin
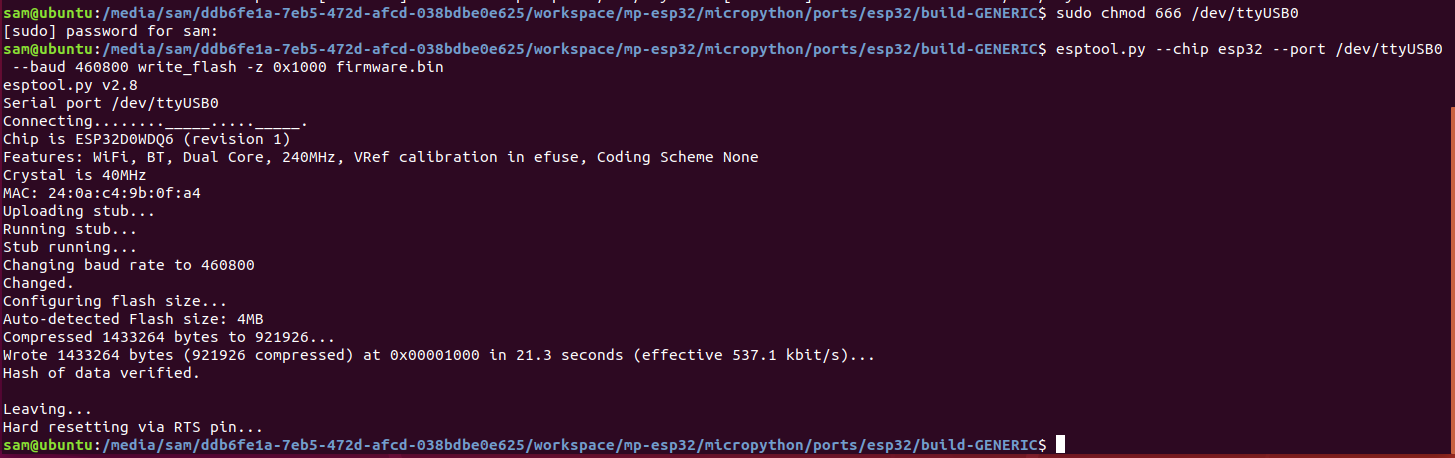
燒錄完成!
使用 PuTTY 來測試一下吧
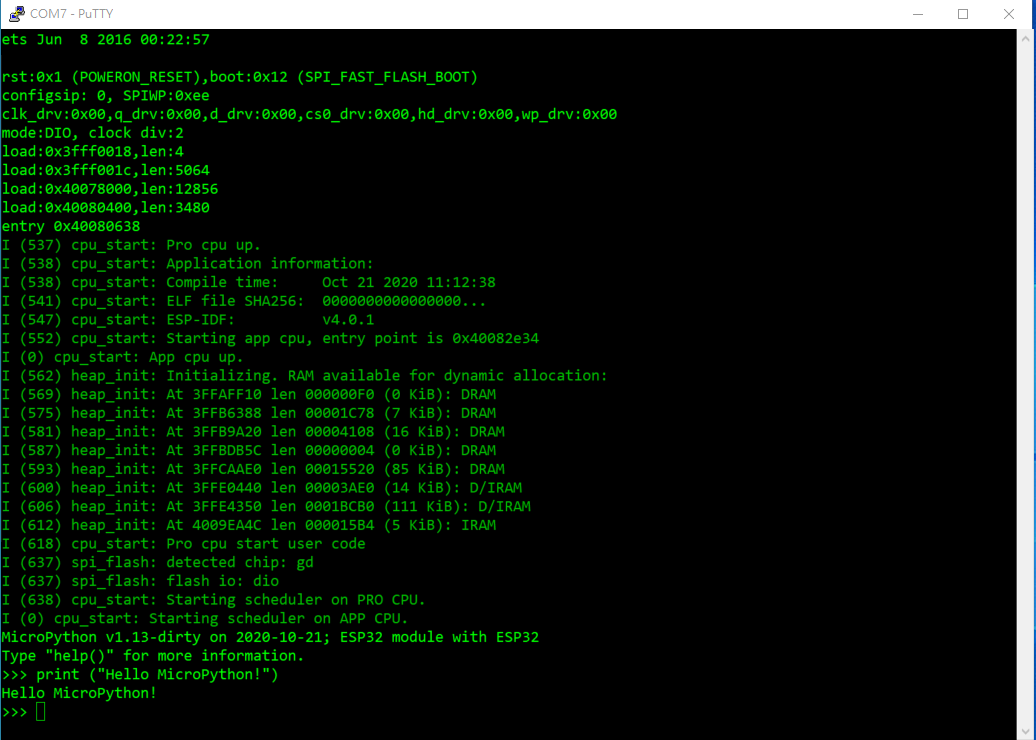
成功!




